Project
Project objecive
The main objective of this project is to design and implement new algorithms as well as a demonstrator enabling :
- Coaches can generate 3D running movements intuitively, quickly and unambiguously.
- Runners can see the 3D movements generated, with relevant and understandable visual cues.
Proposed method
During this project, we will build the following prototype:
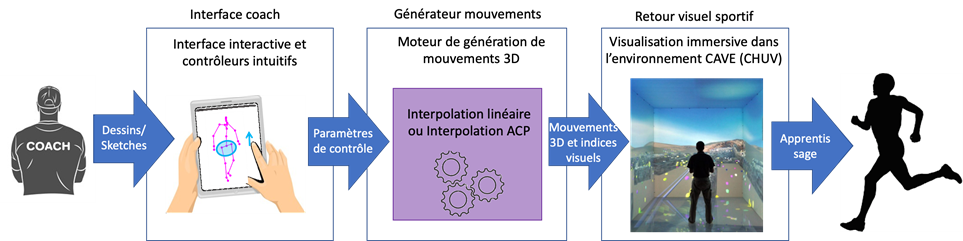
The envisaged user experience is as follows:
- A coach holds a graphics tablet and can watch a pre-existing 3D running movement. He draws lines directly on the screen to edit intuitive controls..
- These intuitive controls transfer their control parameters to the 3D motion generation engine.
- This engine generates a running movement, respecting the specified parameters. It also generates the relevant visual cues, relative to the modifications given by the coach..
- The movement and visual cues are then displayed on a dedicated system, such as the CAVE at the CHUV.
- The runner looks at the new movement, with the associated visual cues, and understands the modifications to be made to his or her run to maximize performance.
The SBML-CHUV is currently building a system for measuring and analyzing running movements. In particular, this system uses an optical motion capture system (VICON). Once the measurement has been taken, the coach uses the kinematic information from the reconstructed 3D movement to provide feedback to the runner. This project will benefit from this system to measure and capture the necessary initial data.
Integration generally represents a major risk to the success of a project. What’s more, you’ll need to be able to iterate rapidly on prototype versions based on the results of analysis and testing. Finally, work will be carried out in parallel, in 2 different teams. For these reasons, we will be using agile techniques during development, as they have proven their robustness and effectiveness. In particular, KANBAN will be evaluated and apriori used during this project. In addition, a continuous integration system will be set up at the start of the project. This will ensure that all developments are continuously integrated and validated. Finally, monthly reviews will ensure compliance with the best practices agreed at the start of the project. In order to easily test methods and iterate rapidly, the Python ecosystem will be used. In particular, the Numpy package and the GeeXLab rapid prototyping application will be used. Linear interpolation will mainly be implemented using the Numpy package. For PCA, the scikit-learn package will be used. Finally, for the construction of the VAE, the Keras framework will be used.
Impacts
Scientific impacts
This project follows on from the lead applicant’s work on 3D motion creation techniques for artists [Harish20161][Mahmudi20162] presented at Siggraph 2016. These techniques use kinematic trajectories drawn by users. This project extends this idea to use even higher-level constraints (intuitive controls) for sports (running, squats, ice hockey, etc.) as well as rehabilitation. In particular, the usability of the prototype built is at the heart of our approach. It will be measured and evaluated using standard techniques (including SUS). To our knowledge, this is the first time that a 3D motion generation prototype will specifically target sports coaches. We therefore plan to publish a scientific article in a peer-reviewed Open Access journal presenting the demonstrator, together with the results of the user studies carried out.
In the medium term, we are already planning several research projects involving optical real-time 3D motion capture systems (VICON, CHUV), as well as non-contact measurement systems such as the one currently being developed at HE-Arc [Projet GAPKO, 2021].
Technological impact
The Python ecosystem has become a benchmark for data analysis and visualization. Popular packages such as Numpy and Pandas have become indispensable. To date, however, there is no Python package sufficiently documented to be easily reused by other researchers or industrialists. During this project, we will ensure that the Python package for 3D motion is easily reusable. It is also planned to use it in the future for other research projects requiring the analysis of 3D motion data. It will therefore need to be robust and optimized.
To our knowledge, this is the first time that a 3D motion generation application has targeted coaches as end-users. The HMIs will therefore have to be intuitive, robust and fast. In particular, a pilot study will conclude this project to validate the usability and acceptability of the prototype created. In this way, the motion generation tool is aimed at a non-animation expert audience such as sports coaches, but could also be used in the field of physiotherapy, for example.
Socio-economic impacts
The aim of the project is to optimize running training, maximizing final performance and reducing the risk of injury. In addition, it is part of an ambitious longer-term vision to measure and analyze 3D movements in real time, in order to communicate crucial information automatically and live. In addition to sport, the plan is to apply this research to the field of rehabilitation for patients suffering from osteoarthritis of the knee. This disease has a major social and economic impact: in Switzerland, for example, it affects 2 million people, at a total cost to society of several billion per year.
- Pawan Harish, Mentar Mahmudi, Benoît Le Callennec, and Ronan Boulic. “Parallel Inverse Kinematics for Multithreaded Architectures.”, ACM Transactions on Graphics, 2016. ↩︎
- Mentar Mahmudi, Pawan Harish, Benoît Le Callennec, and Ronan Boulic. “Sketch-based per-frame inverse kinematics.”, ACM SIGGRAPH/Eurographics Symposium on Computer Animation: Posters, 2016. ↩︎